重心移動できない原因
こんばんは!横浜本牧パーソナルトレーナー宮原崇です。
今日も清々しい秋晴れで、朝からトレーニング日和でした。
筋肉を成長させるのにも有効的ですが、なんといっても身も心も良い状態で1日のスタートを切れるのが最大の魅力です。
さて、今日は私たちが何気なく私生活で行っている歩行における重心移動について学んでいきたいと思います。
ヒトの歩行は実はとても繊細な動きをしていて、理想的な歩行動作を獲得するのは意外と難しいです。
しかし、どんなメカニズムで動いていて、最低限どのような能力を獲得すると良いのか一つずつ紐解いていくと答えが見つかりやすくなります。
ここでもやはり足部の着眼点が必要になってきます。
右から左、左から右というふうに交互運動を行うためには、股関節の内転・外転と後足部の回内・回外運動、骨盤の側方移動を常に協調性を保ちながら上手く行う必要があります。
ロボットのASIMOも股関節の内外転と足部回内・回外の動きをうまく設計して、ヒトの動きとできるだけ近い歩行動作を実現させていますが、一つだけ真似できないところがあります。
それは地面に接地した時にヒトの足のきめ細かな動きと構造です。
本来は初期接地時に距骨下関節(後足部)が回外した時、前足部が回内をしてバランスを取ることで、足部が剛性化されて内側縦アーチを下げない働きをしてくれています。
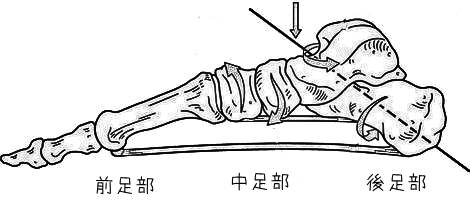
前足部と後足部の動きがあって、初めて股関節の内転運動と骨盤の側方移動ができます。
もし、足部の回内と回外の動きが少ない場合、現実的には内側縦アーチの高さのキープと前足部の回内が少ない影響で母趾球が地面から離れてしまい、床を押す力が低下して反対側の骨盤への側方移動が少なくなってしまいます。
その結果、上半身の代償運動が目立つようになり、大腿骨の回旋筋も上手く働かなくなります。大腿骨の回旋筋とは、、、長くなりそうなので続きはまたいつか書きます。本日は以上です。

